AI 如何像人一样在脑中"想象"世界:LeWorldModel 科普解读
AI 如何像人一样在脑中"想象"世界:LeWorldModel 科普解读
你在厨房里端着一杯水走向餐桌。你没有把水泼出来,也没有撞到椅子。你是怎么做到的?
答案是:你在脑子里模拟了一遍。你在迈步之前,已经"想象"了接下来几步会发生什么——水会怎么晃、椅子在哪里、手应该怎么端。这个过程快到你完全意识不到它的存在,但它确实在发生。
如果 AI 也能拥有这种能力呢?
这正是一篇来自 Yann LeCun 团队的最新论文想要解决的问题。这篇论文叫 LeWorldModel,它让一个 AI 仅通过"看"——没有人告诉它物理规律,没有预先编写的规则——就学会了在脑中建立一个关于环境的内部模型,然后用这个模型来"想象"和规划。
为什么 AI 需要"想象力"
今天最热门的 AI 是 ChatGPT 这样的大语言模型。它们通过阅读海量文字学会了回答问题、写文章、编程序。但请注意一个关键的缺失:它们从未"看"过这个世界,也从未在物理环境中"行动"过。
这带来一个根本性的局限。你可以问 ChatGPT"如果我把杯子推到桌子边缘会怎样",它会回答"杯子会掉下去"。但它给出这个答案,是因为它读过无数描述这个场景的文字,而非因为它真正"理解"了重力。
换一种方式想:一个从未见过水的人,仅通过阅读关于水的文字描述,能学会游泳吗?
世界模型走的是另一条路。它让 AI 直接从视觉画面中学习——看大量的视频或图像序列,从中自己摸索出"这个世界是怎么运转的"。学成之后,AI 就拥有了一个内部的"想象空间",可以在脑中模拟"如果我做这个动作,接下来会发生什么",然后选择最好的方案去执行。
就像你端水过厨房一样。
两种"想象"的方式
AI 构建"想象力"有两种主要方式,区别在于它在脑中"想象"的内容有多详细。
第一种:像放电影一样想象每一帧画面。 这叫生成式世界模型。AI 会在脑中"生成"未来的完整图像——每个像素、每种颜色、每处阴影都要预测出来。优点是信息完整,缺点是计算量极大。想象一下,你只是想决定往左走还是往右走,却要先在脑中完整地渲染出两条路径上的每一帧超高清画面——这显然太浪费了。
第二种:只想象"要点"。 这叫潜在世界模型,也是 LeWorldModel 所属的类别。AI 不去想象完整的画面,而是把每一帧画面"压缩"成一个精简的"要点"表述(技术上叫做"潜在表征"),然后在这个压缩后的空间里做预测。
打个比方:你在脑中想象端水走过厨房时,你并没有在脑中渲染厨房地砖的每一个花纹。你只是记住了几个关键信息——水杯在手里、椅子在右前方大概两步远、餐桌在正前方。这些"要点"就够你做出正确决策了。
LeWorldModel 做的就是这件事:从画面中提取要点,在要点空间里预测未来。
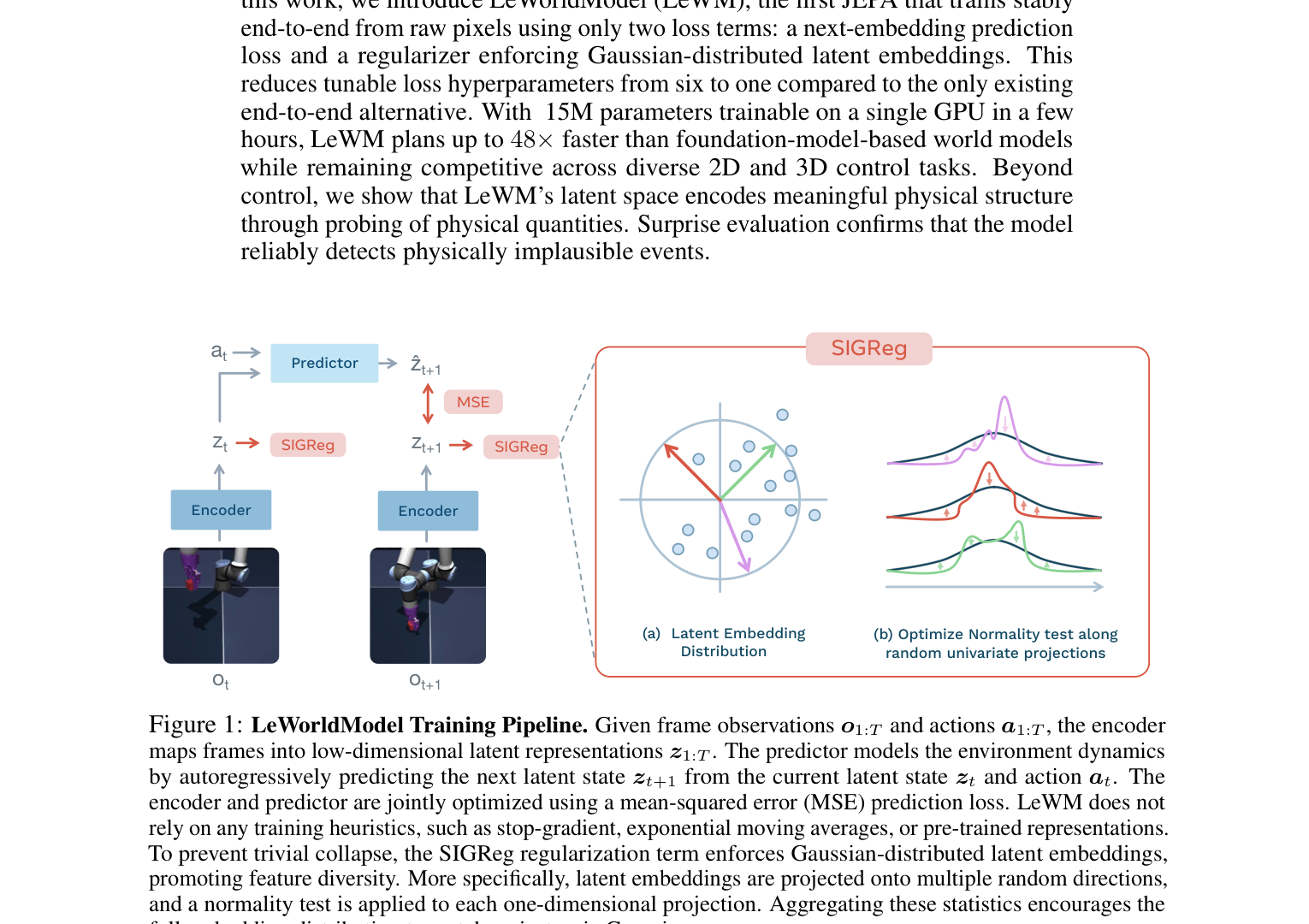
上图是 LeWorldModel 的工作原理。左边两个"Encoder"(编码器)负责把原始画面压缩成要点。中间的"Predictor"(预测器)根据当前的要点和执行的动作,预测下一时刻的要点。右边的"SIGReg"是防止系统偷懒的机制(后面会解释)。
一个听起来很蠢但很致命的问题
这套"提取要点,然后预测"的框架听起来很优雅,但它有一个致命的bug——AI 会"偷懒"。
想象你在教一个学生做数学题。你告诉他"我会检查你的答案是否正确"。这个学生发现了一个"完美"的策略:不管题目是什么,他都回答"0"。如果批改老师也学会了同样的策略——不管输入什么,都把"正确答案"设为"0"——那这个学生永远都能得满分。
这在 AI 领域叫"表征坍缩"。编码器把所有不同的画面都压缩成同一个"要点"(比如全是零向量),然后预测器永远输出这个固定值,预测误差为零。技术上看,损失函数达到了最小值,系统"完美"地完成了训练目标。但实际上,它什么都没学到。
这不是一个假设性的风险——在 LeWorldModel 之前,几乎所有尝试这种架构的研究都被这个问题折磨过。
现有方案:各种"反偷懒"策略
研究者们发明了各种方法来阻止 AI 偷懒,但每种方法都有明显的代价:
策略一:请一个外部监督员。 有一种方法叫 DINO-WM,它用一个已经在海量图片上训练好的视觉模型(DINOv2,在 1.24 亿张图片上训练过)来充当编码器,而且冻结这个编码器不让它更新。这就好比请了一个经验丰富的外部顾问来做"压缩要点"的工作,自己只训练"预测"那一部分。问题是:这个外部顾问是通用的,它从互联网图片中学来的经验不一定适合你要解决的具体任务。
策略二:加大量防偷懒规则。 另一种方法叫 PLDM,它在训练目标里塞进了七个不同的损失项,用复杂的规则来防止坍缩。这就好比一个公司为了防止员工摸鱼,搞了七套考核制度。结果是:六个超参数需要手动调整,不同的规则之间可能互相冲突,系统变得极其难以稳定。
策略三:各种工程技巧。 还有的方法用 stop-gradient(切断梯度)、指数移动平均(EMA)等技巧来间接地防止坍缩。这些技巧在实践中有效,但研究者并不完全理解"为什么有效"——它们更像是经验配方而非有根据的解决方案。
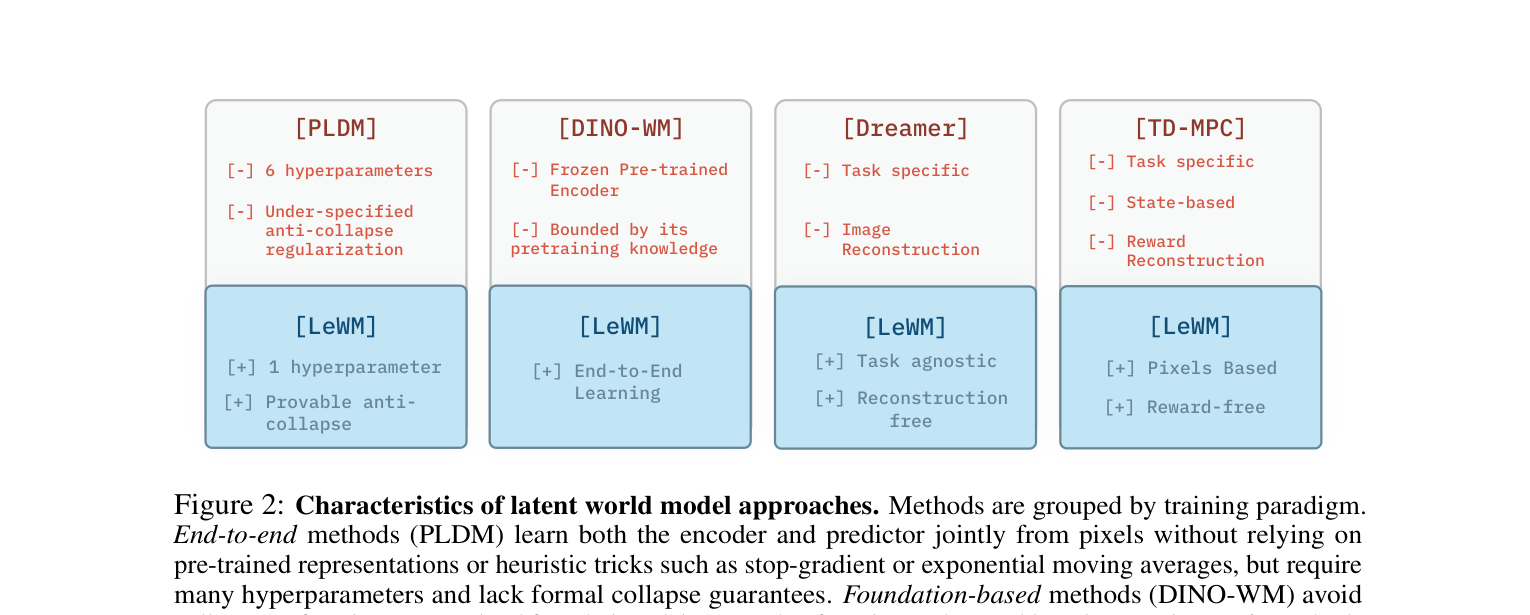
下图对比了这些方法的特点。每个方框上方的 [-] 表示局限,下方的 [+] 表示 LeWM 如何克服了该局限:
LeWorldModel 的做法:一条极简规则
LeWorldModel 的核心贡献是找到了一个极其简洁的"反偷懒"方案。
它的训练目标只有两项:
第一项:预测要准。 给定当前画面的"要点"和执行的动作,预测下一时刻的"要点",预测误差越小越好。这是世界模型的核心功能。
第二项:要点不能都一样。 这就是 SIGReg 正则化。它的要求用大白话说就是:编码器压缩出来的"要点"必须呈现多样性,不同的画面必须对应不同的要点,而且这些要点的整体分布必须"散开",像一团均匀扩散的烟雾一样。
如果 AI 想偷懒把所有画面都映射到同一个点,第二项规则就会重重地惩罚它——因为一个点不是"均匀散开的烟雾"。
就这两条规则,没有了。没有七项损失函数,没有冻结外部模型,没有无法解释的工程技巧。论文作者还证明了,这个方法在数学上有严格的防坍缩保证——不是"经验上有效",而是"可以证明有效"。
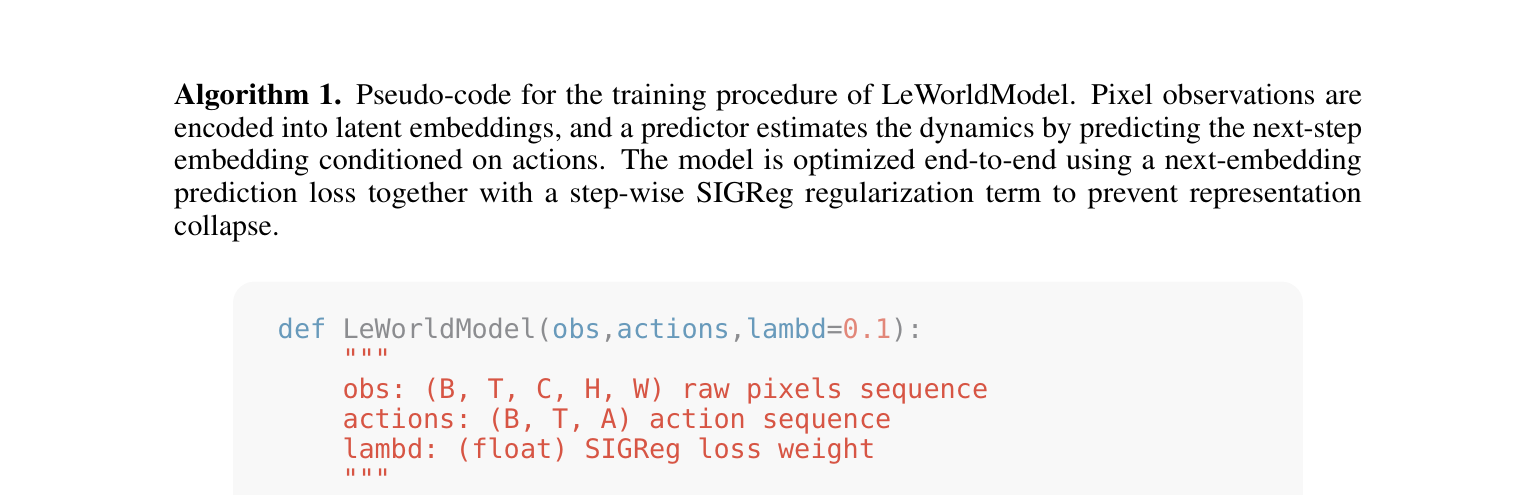
整个训练过程的代码短到可以放在半页纸上:
唯一需要手动调整的参数只有一个:两条规则之间的权重比(λ)。默认值 0.1 在大多数情况下就能用。
用"想象力"做规划
训练完成后,LeWorldModel 就拥有了一个环境的内部模型。接下来它要用这个模型来规划行动。
规划过程可以用一个日常比喻来理解。假设你在一个陌生的房间里,要把一个方块推到指定位置:
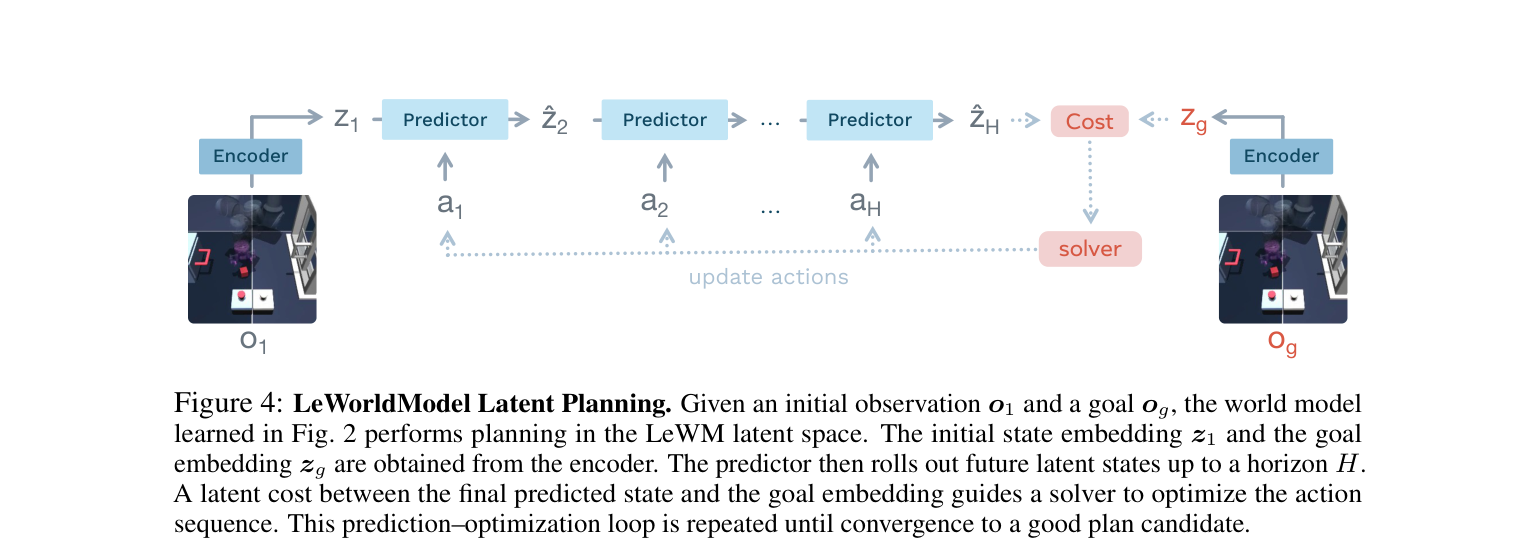
观察现状: 你看到方块在哪里(当前画面),也知道目标状态是什么样(目标画面)。编码器把这两个画面分别压缩成"当前要点"和"目标要点"。
脑中推演: 你在脑中尝试不同的动作序列——"先向右推三步,再向前推两步"。预测器根据你假想的每个动作,在要点空间里依次推算每一步的结果。
评估方案: 推演结束后,看看终点的"要点"离"目标要点"有多远。如果很远,说明这个方案不好。
优化选择: 同时试上百个随机方案,选最好的那些,在它们附近继续搜索更好的方案。反复迭代几轮,找到一个足够好的动作序列。
只走第一步: 执行方案的前几步动作,然后重新观察现状,重新规划。这避免了一次性规划太远而累积误差。
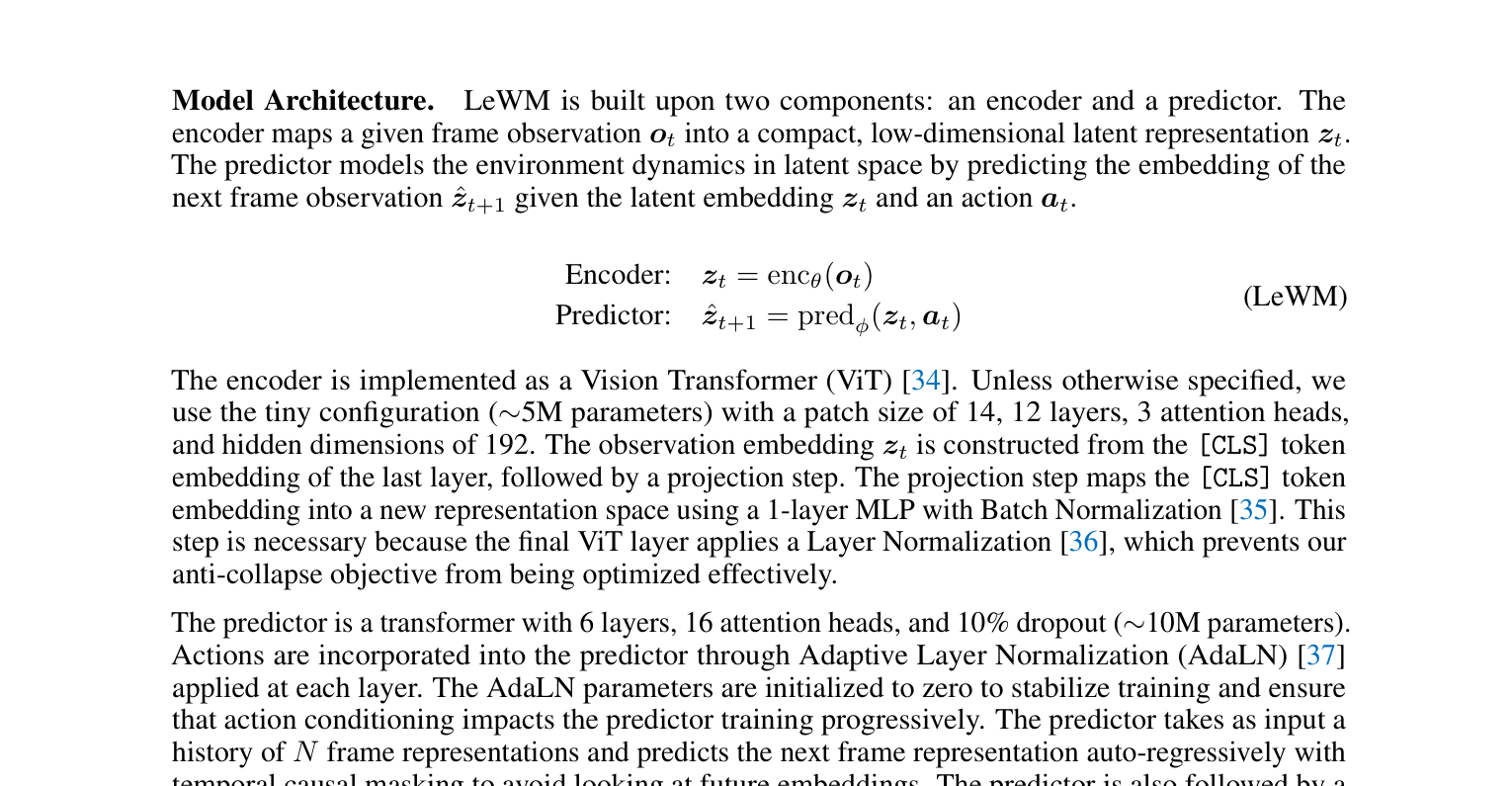
这一切都发生在"要点空间"里——一个只有 192 个数字的压缩空间。相比之下,一帧 84×84 的彩色画面有超过 2 万个数字。在压缩空间里做规划,计算量小了几个数量级。
实际效果:快了 48 倍
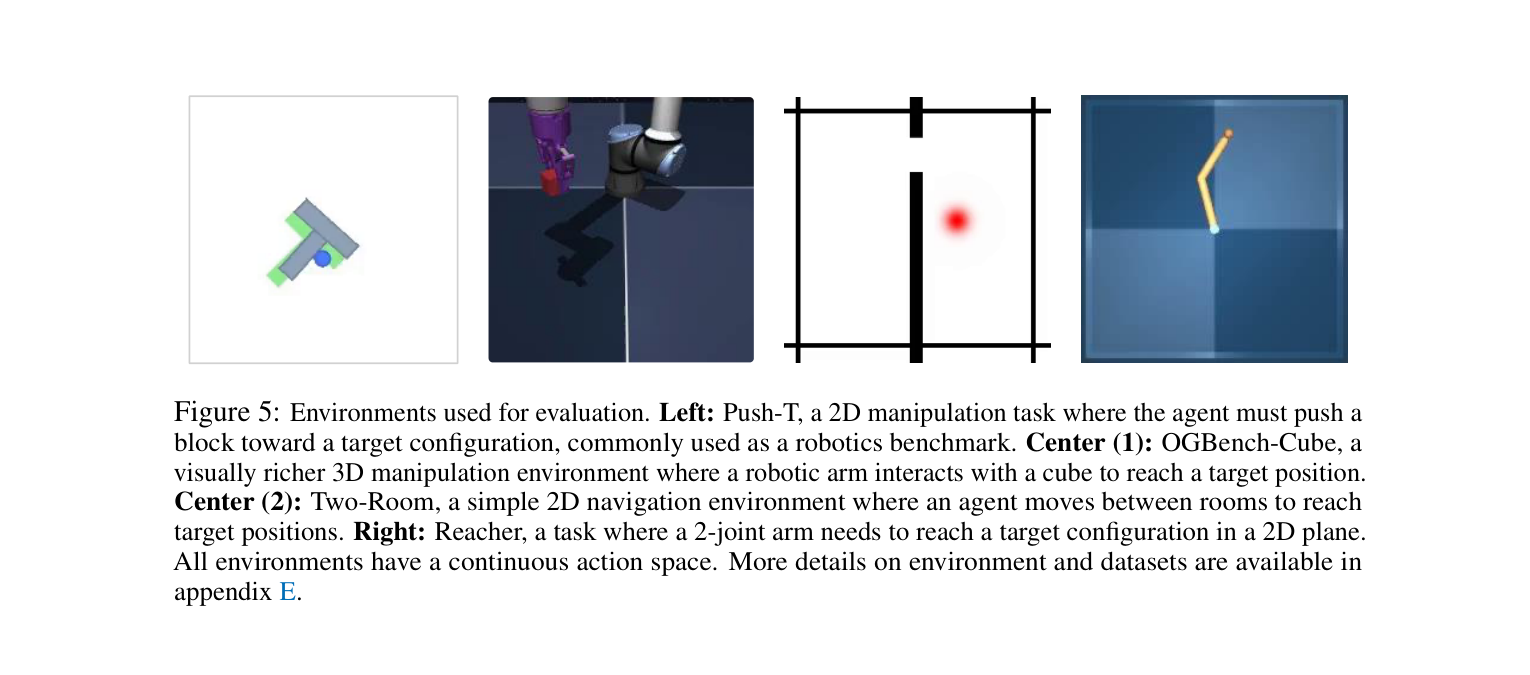
论文在四个不同的测试环境中验证了 LeWorldModel:
从左到右分别是:推 T 形方块的二维任务、三维机械臂抓方块、二维房间导航、以及二关节机械臂。
核心结果一:规划效果有竞争力。
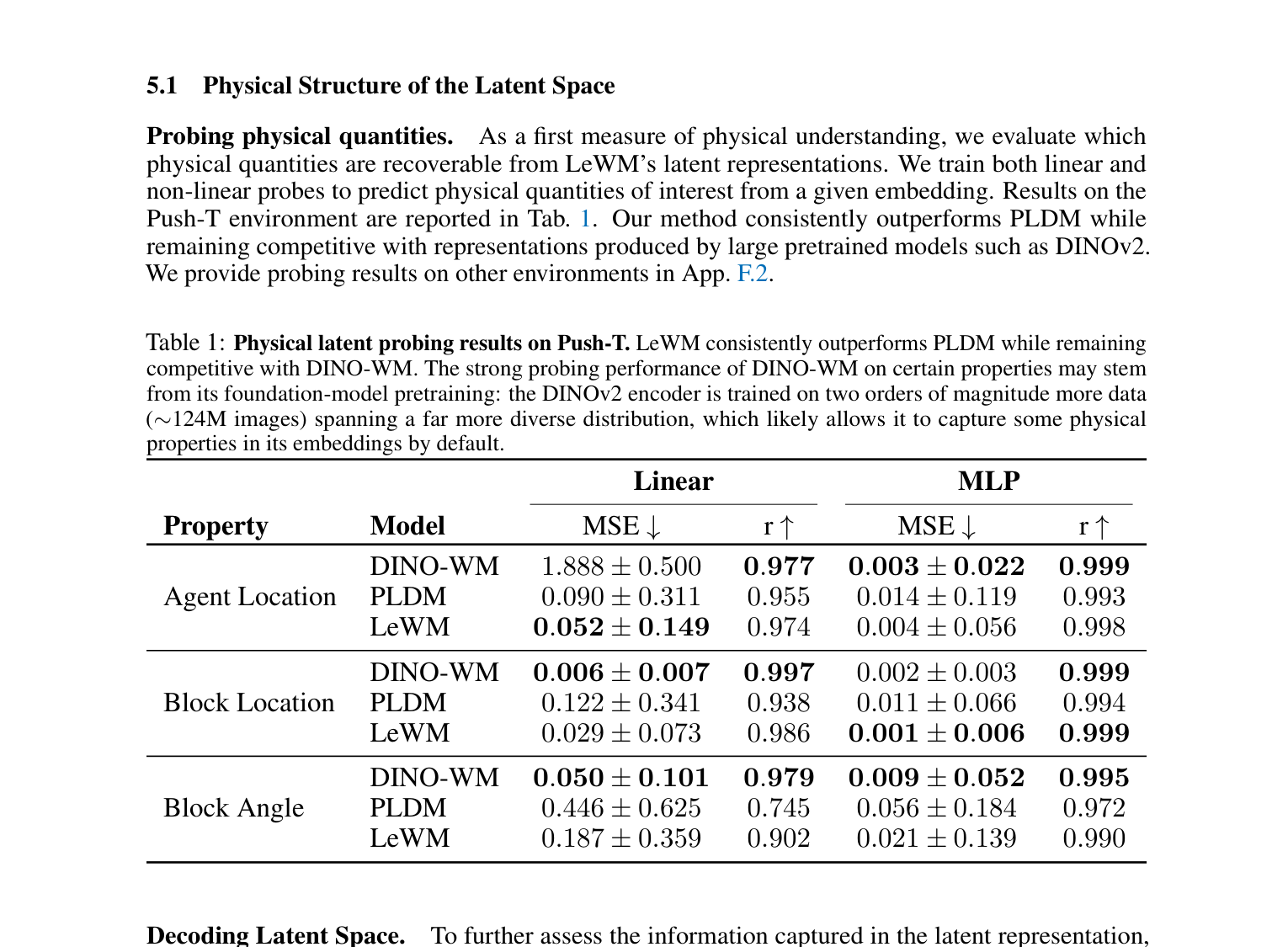
在 Push-T(推方块)和 Reacher(机械臂够目标)任务上,LeWorldModel 的表现优于那个使用七项损失函数的复杂方法(PLDM),也优于那个使用 1.24 亿张图片预训练编码器的方法(DINO-WM)。
一个只有 1500 万参数、从零开始训练的小模型,打败了依赖海量预训练的大模型——这本身就说明了"在正确的框架下学习"比"堆参数和数据"更重要。
核心结果二:规划速度快了 48 倍。
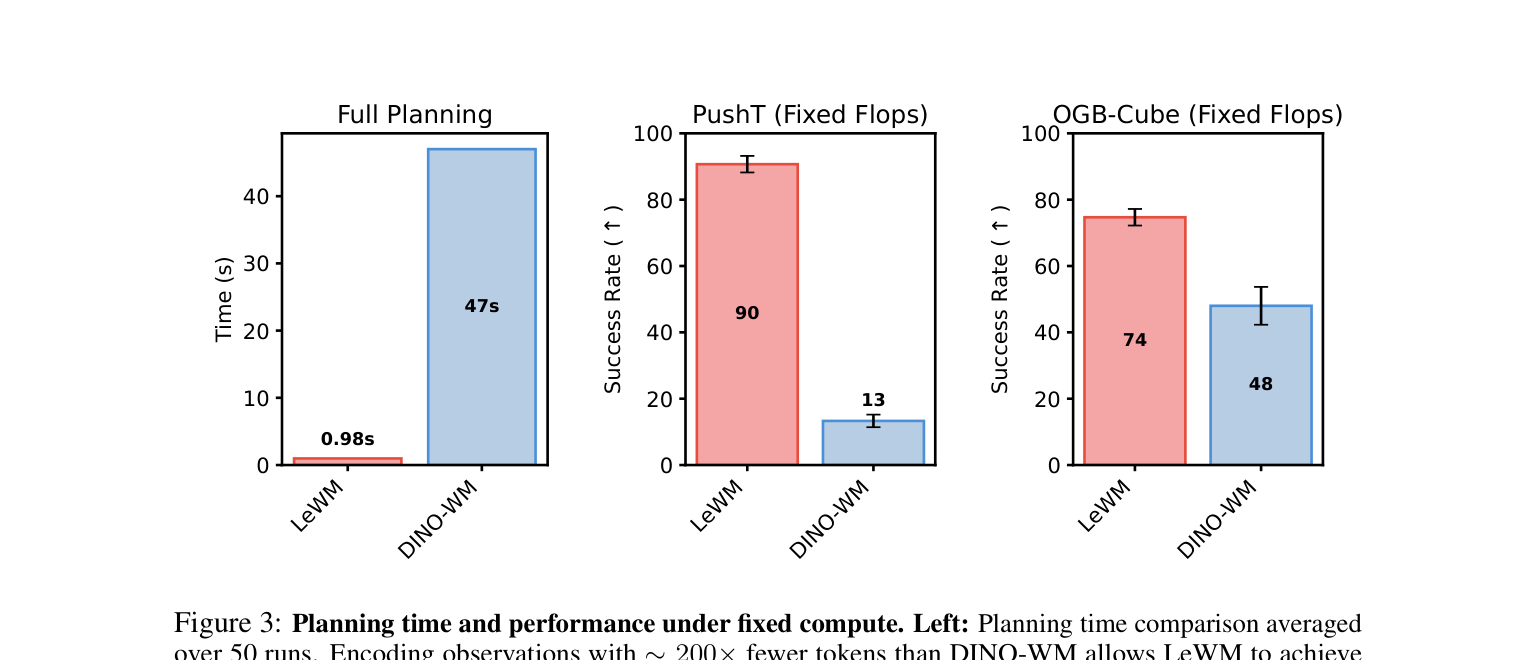
由于 LeWorldModel 的"要点"表述极其紧凑(192 个数字),它做一次完整的规划只需不到 1 秒。而使用预训练大编码器的 DINO-WM 需要 47 秒——因为它的"要点"表述太大了(token 数量多出约 200 倍)。
在相同的计算预算下比较(右边两张图),LeWorldModel 在 Push-T 上的成功率是 90%,DINO-WM 只有 13%。
核心结果三:单块 GPU,几小时搞定。 LeWorldModel 的模型只有 1500 万参数(作为对比,ChatGPT 背后的 GPT-4 有超过万亿参数),在普通的单块 GPU 上几个小时就能训练完成。
它真的"理解"物理吗
一个核心问题是:LeWorldModel 在压缩画面时,是否真的抓住了物理世界的关键信息,还是只是在做某种统计上的模式匹配?
论文通过几个漂亮的实验回答了这个问题。
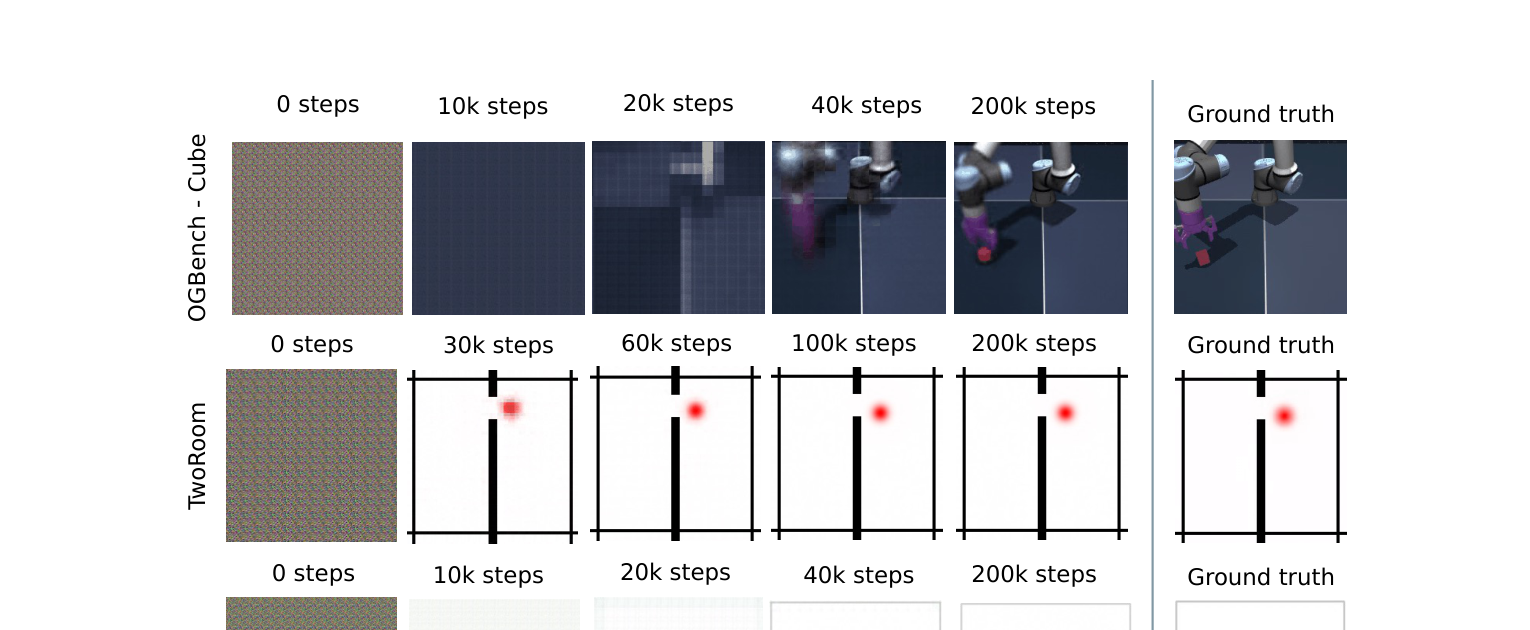
实验一:从要点恢复画面。 作者训练了一个"解压器",把 192 个数字还原成画面。注意,LeWorldModel 训练时从来不需要恢复画面——这个解压器是事后加上去的,纯粹用来检验那 192 个数字里到底保存了多少信息。
结果令人惊讶:随着训练进行,从 192 个数字恢复出的画面越来越清晰,最终几乎和真实画面一模一样。这说明那 192 个数字虽然压缩了 99% 以上的数据量,但几乎没有丢失关键信息。
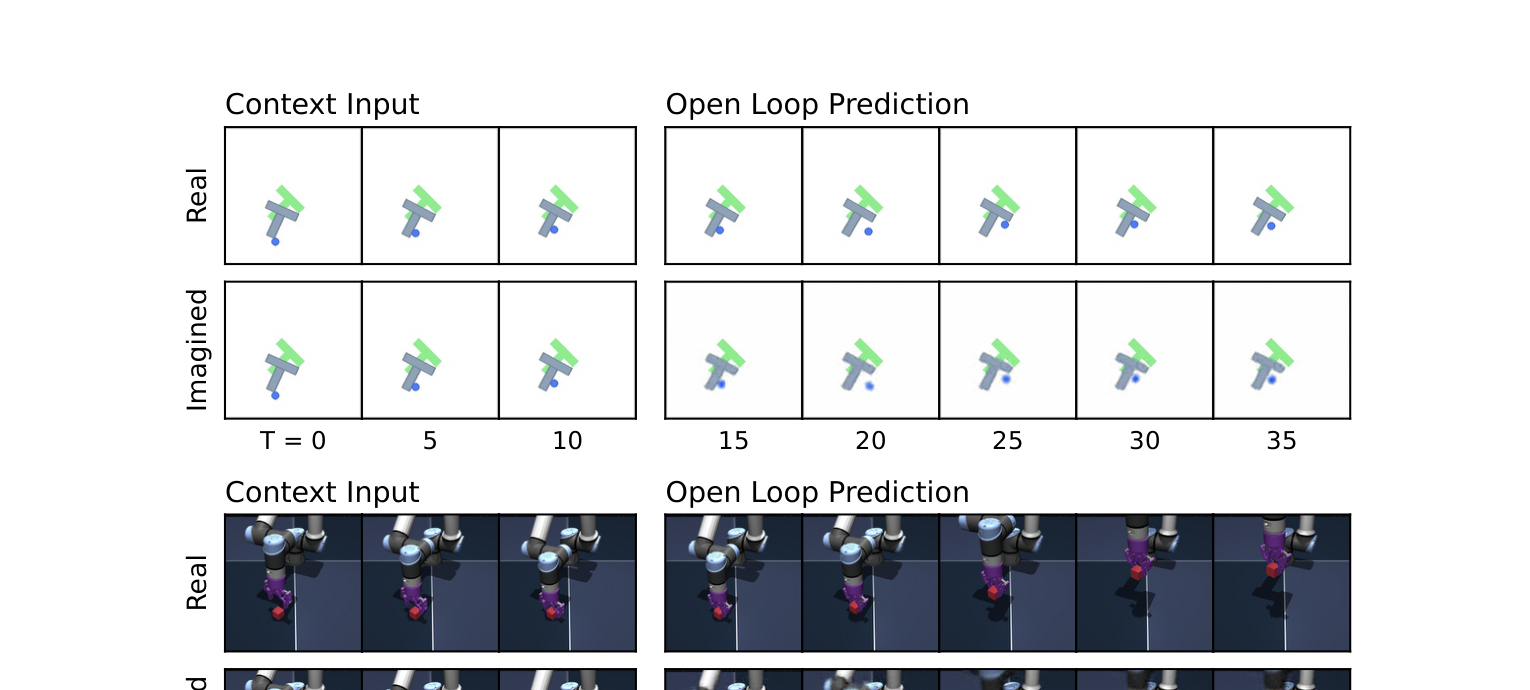
实验二:预测器的"想象"有多准。 给模型三帧画面作为上下文,再给一串动作,让预测器在要点空间里"想象"接下来会发生什么,然后用解压器把"想象"还原成画面:
上面一行是真实发生的画面,下面一行是 AI"想象"出来的画面。几乎完全吻合。这个 AI 真的在脑中"播放"了一部和现实高度一致的"电影"。
实验三:违反预期测试。 这是最有趣的一个实验,灵感来自发展心理学中测试婴儿认知能力的经典方法。
心理学家发现,即使是几个月大的婴儿,当看到"不可能"的事件时(比如一个球穿过了一堵墙),也会表现出"惊讶"——注视时间变长。这说明婴儿已经对物理世界有了基本的"预期"。
论文对 LeWorldModel 做了类似的测试:让它观察正常的画面序列,然后突然做两种"扰动"——一是让物体的颜色突然变了,二是让物体突然"传送"到了另一个位置。然后测量模型的预测误差(类比于"惊讶程度")。
结果清楚地显示:当物体突然传送时(蓝色线),模型的"惊讶度"急剧飙升。但当物体只是换了颜色时(绿色线),模型的反应相对平静。
这意味着什么?LeWorldModel 学会了区分"物理性变化"和"外观性变化"。它"知道"物体不应该凭空消失又出现在别处,但颜色变一变倒不是什么大事。
没有人教它牛顿定律,没有人给它编写物理引擎,它只是看了大量的画面序列,就自己发展出了这种朴素的"物理直觉"。
它的局限性
LeWorldModel 当然远非完美,论文也坦诚地讨论了几个主要局限:
只能做短视规划。 就像你在脑中推演走路不会一次性想十分钟后的情况一样,LeWorldModel 的"想象"也只能推演有限的未来。每一步预测都有微小的误差,步数越多误差越大。目前它只适合几十步以内的短期规划。
测试环境还比较简单。 推方块、够目标这些任务虽然对 AI 来说已经不容易,但和真实世界的复杂度(比如在一个杂乱的厨房里做饭)相比差距还很大。
需要"动作标签"。 训练数据不仅需要画面,还需要知道每一帧对应执行了什么动作。在机器人场景中这很容易获取,但在自然视频中就难了。
简单环境反而表现差。 在最简单的二维导航任务中,LeWorldModel 的表现反而不如其他方法。这是因为它的防偷懒机制(SIGReg)要求"要点"的分布像均匀的烟雾一样散开,但当环境本身信息量很少时,强制"散开"反而引入了无意义的噪声。
为什么这篇论文值得关注
站远一步看,LeWorldModel 的意义超越了技术细节本身。
它证明了"简洁"的力量。 在 AI 研究中有一种越来越明显的趋势:通过不断堆叠技巧来提升性能——更多的损失函数、更多的超参数、更复杂的训练流程。LeWorldModel 反其道而行之,只用了两条规则就解决了别人用七条规则都解决不好的问题。这提醒我们,当一个方案需要大量补丁才能工作时,也许问题出在方案本身,而非补丁还不够多。
它降低了研究门槛。 单块 GPU、几小时训练、1500 万参数——这意味着大学实验室甚至个人研究者也能复现和改进这项工作。在 AI 研究越来越被大公司和大算力垄断的今天,这种"平民化"尤为可贵。
它关乎 AI 发展方向之争。 当前 AI 的主流路线是大语言模型——通过阅读文字来"理解"世界。而 LeWorldModel 代表的是另一条路线——通过"看"和"做"来理解世界。这篇论文用实验证明了,一个仅从画面中学习的小模型,可以自发地发展出物理直觉——不需要语言作为中介。
两条路线未必互相排斥。未来更强大的 AI 可能同时拥有"阅读理解"(大语言模型)和"物理想象"(世界模型)两种能力。但至少 LeWorldModel 证明了:通往物理理解的这条路是走得通的,而且比我们以为的要简单得多。
一句话总结
LeWorldModel 让 AI 仅通过"看"就学会了在脑中"想象"世界的运作方式——只用了两条训练规则、1500 万参数、一块 GPU——并且这个 AI 还自发地发展出了区分"物理违规"和"外观变化"的能力。它不是通用人工智能的答案,但它可能是通往答案的路上一块重要的铺路石。
If you read this far — thank you.
Come tell me what you thought on X.